


Description
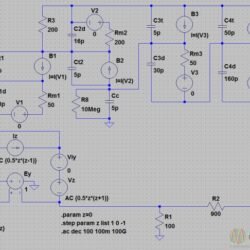
DC motor speed drive compensated with a PI Proportional Integrative controller. The motor steps from 0 to 4000 rpm and from 4000 rpm to 3500 rpm. The transient analysis shows a under-damped response and a steady state error null.
- Free
- Intermediate
- 11-20
- NI Multisim
- 12
- Yes
-




Reviews
There are no reviews yet.