



Description
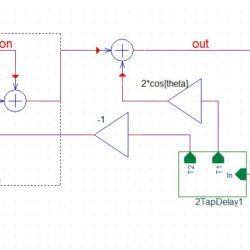
Digital convolution is an important concept in linear time-invariant (LTI) systems and is used to predict the output response for any input signal. The output y(n) is obtained by convolving the input signal with the impulse response of the system as y(n) = x(n)*h(n), where * represents convolution and not the multiplication operator. This simulation demonstrates digital convolution using the “flip and slip” method. The impulse response, h(n), is flipped in time before being multiplied by the input signal. T parts are used instead of LAPLACE parts.
- Free
- Intermediate
- 11-20
- PSpice
- 9.1+
- No
-





Reviews
There are no reviews yet.