



Description
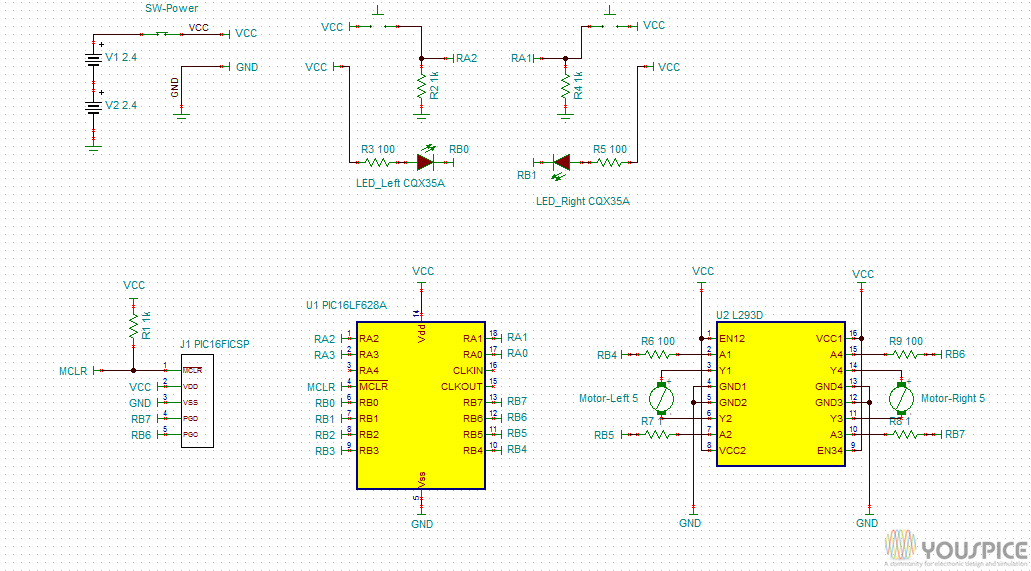
Simulation of a buggy robot with left and right contact sensors.When the left contact sensor is pressed, the robot stops, goes back, turns clockwise, and continue to move forward.When the the right contact sensor is activated, the robot stops, goes back, turns counterclockwise and goes forward.Two DC Motors are drived by a L293D that converts logic signals from PIc to analog power signals to drive the electrical motors.
- Free
- Intermediate
- 21-30
- TINA
- 7+
- Yes
-







Reviews
There are no reviews yet.